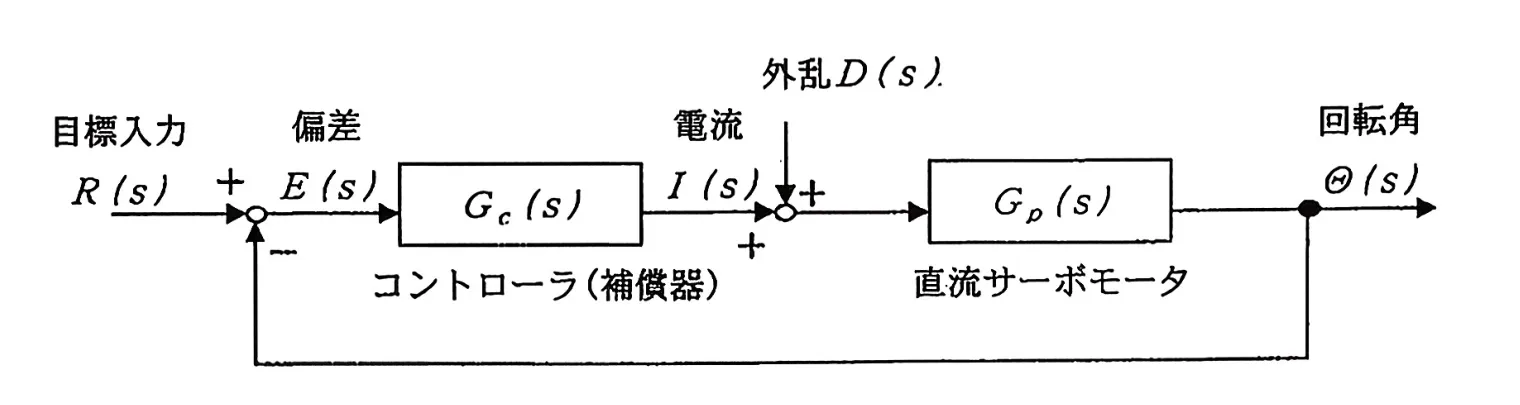
図に示す直流サーボモータの回転角制御系について以下の問いに答えよ.ただし,モータの回転角を ,モータの駆動電流を ,目標入力を ,偏差を ,外乱を とし,それぞれのラプラス変換を とする.
(1) 直流サーボモータの運動方程式は,外乱 がない場合には, を定数として
で表される.この直流サーボモータの伝達関数 を求めよ.
(2) 目標入力 ,外乱 とモータの回転角 との関係を,モータの伝達関数 ,コントローラの伝達関数 を用いて表わせ.
(3) コントローラを比例微分補償器 とするとき,フィードバック制御系の特性方程式を求めよ.さらに, のとき, に対する根軌跡を書き,フィードバック制御系の安定性を論ぜよ.
(4) 最終値の定理について説明せよ.また, のとき,目標入力 (単位ランプ入力)と,外乱 (定常外乱)が同時に加わった場合の定常偏差を求めよ.
解答:
(1)
運動方程式の両辺を初期値 でラプラス変換すると,
したがって,伝達関数 は,
(2)
ブロック線図より,以下の関係式が成り立つ.
を消去して整理すると,
(3)
フィードバック制御系の特性方程式は であるから,
のとき,特性方程式は となる.これを について整理すると,
(4)
最終値の定理の説明:
関数 のラプラス変換を とし, の極がすべて左半平面にあるとき, が成り立つ.
定常偏差の計算:
偏差 より,
与えられた条件より であり, を代入すると,
定常偏差 は,
本题主要考察经典控制理论中线性系统的数学模型建立、方框图化简、根轨迹分析以及稳态误差的计算。第一问通过对给定的线性常微分方程进行零初始条件下的拉普拉斯变换,直接得到了被控对象直流伺服电机的传递函数。第二问要求利用给定的控制系统方框图,通过代数运算得出输出信号与参考输入和扰动输入之间的传递关系表达式。第三问中特征方程由闭环传递函数的分母为零直接得到。在描述根轨迹时,将参数隔离出来构造等效的开环传递函数,计算出复数极点作为起点,原点及无穷远处作为终点,并求出在实轴上的分离点,从而准确描述出根轨迹的整体走向。由于根轨迹始终处于复平面的左半部分,可以得出系统绝对稳定的结论。第四问首先简述了终值定理的适用条件和数学表达式,随后利用线性系统的叠加原理,将斜坡输入和阶跃扰动分别代入误差传递函数中,最终通过终值定理求极限得到系统的稳态误差。