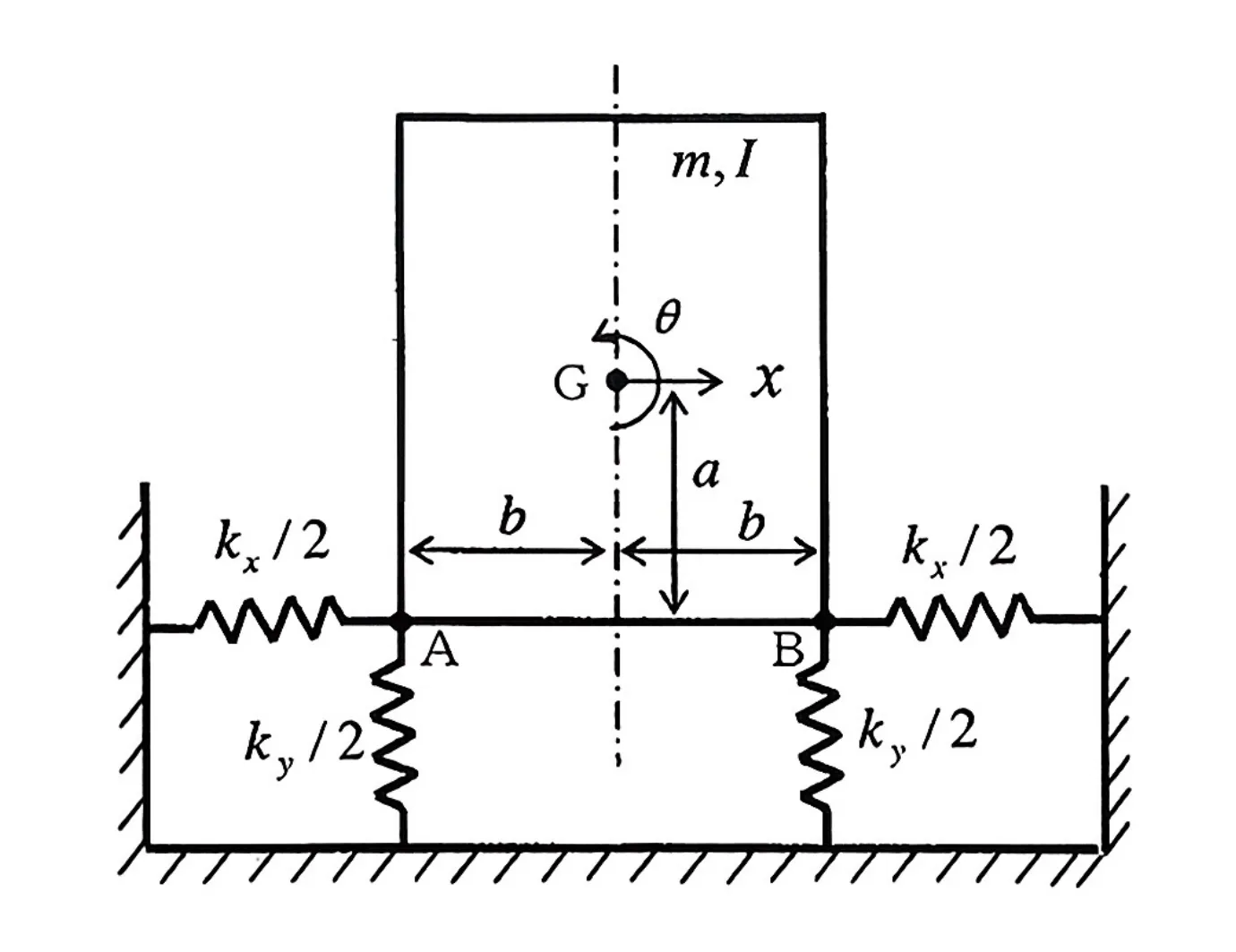
下図のように,質量 ,重心まわりの慣性モーメント の剛体が,点 において,水平ばねと鉛直ばねで支持されている.点 の水平ばねのばね定数はともに ,鉛直ばねのばね定数はともに とする.また,図示したように,重心 と辺 の距離を ,辺 の長さを とする.この剛体の平面運動について,以下の設問に答えよ.ただし,剛体の変位は微小とする.
(1) 剛体の重心の水平変位を (右方向を正とする),重心まわりの回転角を (反時計方向を正とする) とする.剛体の水平運動と回転運動に関する自由振動の運動方程式を求めよ.ただし, と の2次以上の微小項は省略する.
(2) この系は2個の固有円振動数 (ただし, とする),2個の固有振動モード (ただし, は 次モードの水平変位振幅,回転角振幅である) を持っている.固有円振動数 を求めるための振動数方程式 (特性方程式ともいう) を導け.
(3) には次の関係があることを示せ.
(4) 固有振動モード に関して, としたときの1次モード,2次モードの固有振動モードを図示せよ.
解答:
(1)
剛体の運動エネルギー は,
点A, Bの変位を考える。重心Gが水平に 変位し,反時計回りに微小角 回転するとき,各点の変位は以下のようになる。
点Aの水平変位:
点Bの水平変位:
点Aの鉛直変位:
点Bの鉛直変位:
系に蓄えられるポテンシャルエネルギー は,
ラグランジュの運動方程式 を適用する。
について:
について:
よって、運動方程式は以下の通り。
(2)
自由振動の解を とおき,運動方程式に代入すると,
非自明な解をもつ条件(係数行列の行列式が0)より,特性方程式は以下のようになる。
展開して整理する。
(3)
(2)の特性方程式の左辺を の関数 とおく。
この方程式の2根が である。 における の値を評価する。
物理的条件より であるため、 となる。
関数 は下に凸の放物線(2次の係数 )であり、2つの実数根の間に負となる領域が存在するため、
が成り立つ。(証明終)
(4)
運動方程式の第1式から振幅比を求めると,
と設定すると, である。
(3)の証明より、 かつ であるから、
1次モード () では (時計回り回転)
2次モード () では (反時計回り回転)
となる。剛体の中心線の変位を図示すると以下の通り。
这道题目考察了经典的二自由度耦合振动系统。在第一问中,利用拉格朗日方程和能量法求解运动方程是最佳途径,这能有效避免直接进行复杂的几何位移关系与受力分析。重点在于正确写出弹簧支撑点随质心平动和转动所产生的微小位移叠加。
第二问和第三问紧密相连。求解出关于固有频率平方的特征方程后,第三问要求证明两个固有频率的平方分布在一个特定值 的两侧。这里巧妙利用了二次函数的性质:由于特征方程对应一个开口向上的抛物线,只要证明代入该特定值时函数值小于0,即可严格判定该值必然位于两个根之间,省去了冗长且易错的求根公式计算。
第四问进一步考察了系统模态的物理意义。通过第三问的结论,可以直接判断出当质心发生正向(向右)的单位位移时,第一阶低频模态的旋转角为负(顺时针),表现为绕质心下方的某点作类似单摆的摆动;而第二阶高频模态的旋转角为正(逆时针),表现为绕质心上方某点的摆动。这种平动和转动“同相”与“反相”的耦合特征是多自由度系统模态分析中的核心考点。