時間関数 をラプラス変換した関数を のように書くことにする。
参考:
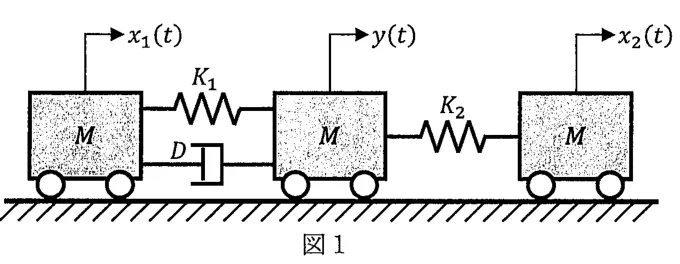
[1] 図1に示す機械系について,以下の問に答えよ。ただし,質量 の台車は水平な床の上を摩擦なく動くものとする。 と はばねのばね定数, はダッシュポットの粘性減衰係数である。 は水平方向の変位であり,それらの導関数を含めたすべての初期値はゼロとする。
- 中央の台車の運動を表す微分方程式を示せ。
- 入力を と ,出力を として, における と を求めよ。
- ,および無次元化した の場合, を求めよ。
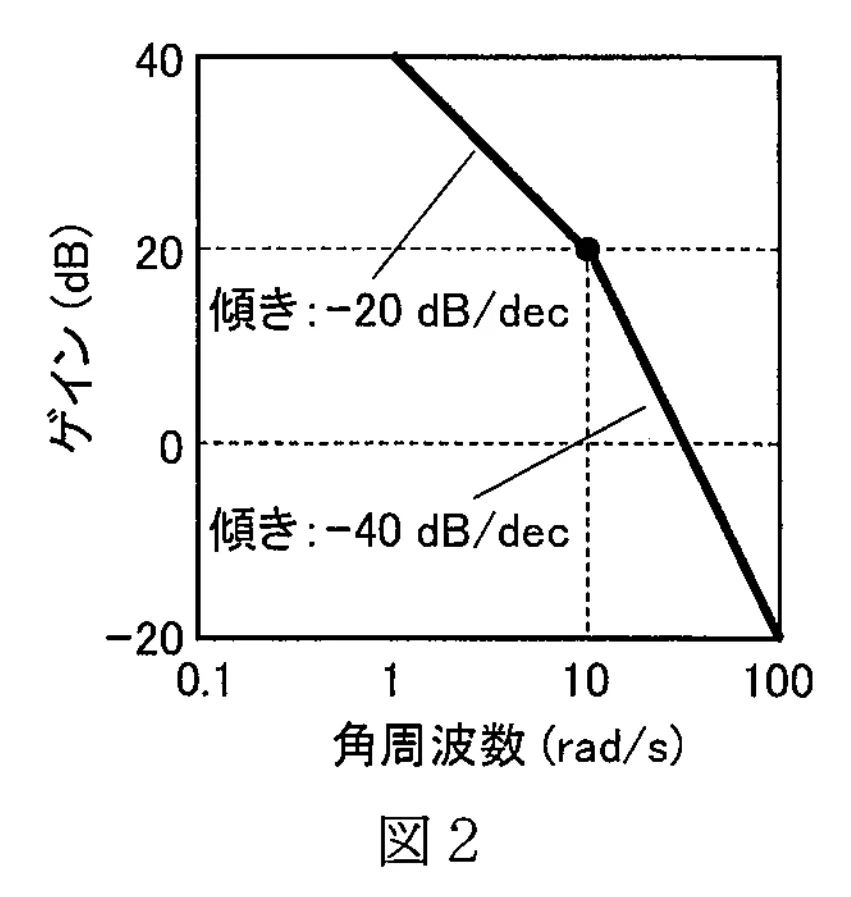
[2] 一巡伝達関数 の折れ線近似ゲイン特性が図2で与えられる直結フィードバック制御系(最小位相系)について,以下の問に答えよ。
- 一巡伝達関数 を求めよ。
- 位相余裕を求めよ。
[3] 問[2]の制御系に補償器 を直列接続し,定常速度偏差をゼロ,ゲイン交叉角周波数を ,および位相余裕を とするとき,以下の問に答えよ。
- 以下の補償器 a)~d)は,それぞれどういう制御・補償方法かを答えよ。ただし,パラメータ は正の実数で, である。
a) b)
c) d) - 補償器 a)~d)のどれを選ぶのが適切か,理由とともに答えよ。
- 2)で選んだ補償器のパラメータを求めよ。
解答:
[1]
1)
中央の台車に働く合力を考慮すると、運動方程式は次のように表される。
変数を整理して、
初期値をゼロとして両辺をラプラス変換すると、
よって、
これより は以下のようになる。
より、 となる。各パラメータを代入して を計算する。
これを部分分数分解する。
逆ラプラス変換を行い を求める。
[2]
1)
図2の漸近線より、低周波領域では の傾きを持ち、 で に変化するため、 の形は となる。
における漸近線のゲインが であるため、
したがって、一巡伝達関数は次式となる。
折れ線近似におけるゲイン交差周波数 は、漸近線 が () となる周波数であるから、
この周波数での位相は、
よって位相余裕 は、
[3]
1)
の条件より、それぞれの補償器は以下の通りである。
定常速度偏差をゼロにするためには、系を2型(原点に極を2つ持つ)にする必要がある。 は1型であるため、原点にさらに1つの極を付加する積分要素が必要である。これに該当するのは d) のみである。
解答:
理由:系を2型にして定常速度偏差をゼロにするため、原点に極を持つ積分要素が必要だから。
新たな一巡伝達関数は となる。
ゲイン交差周波数 で位相余裕が となるため、 である。
であり、 より、
より、 となり、 である。
また、 より、
を代入すると、
题目涉及机械系统的动力学建模以及控制系统的频域分析与补偿器设计。在第一部分,通过受力分析对含有多个质量块和弹簧阻尼的系统建立运动微分方程,并应用拉普拉斯变换求解传递函数和特定输入下的响应,考察了对部分分式展开与拉氏逆变换的熟练程度。第二部分要求从伯德图的渐近线反推开环传递函数并计算相位裕度,其中转折频率与斜率的变化是确定极点位置的关键。第三部分引入了控制系统校正,为了消除稳态斜坡误差,系统需要提高型别,这引导我们选择带有积分环节的PI补偿器。随后利用给定的穿越频率和相位裕度目标,结合反正切函数的特殊值反解出补偿器的参数,这是一个典型的频域综合设计问题。