控制学 直流电机模型 传递函数 伯德图 劳斯稳定判据 稳态误差
時間関数 をラプラス変換した関数を のように書くことにする。
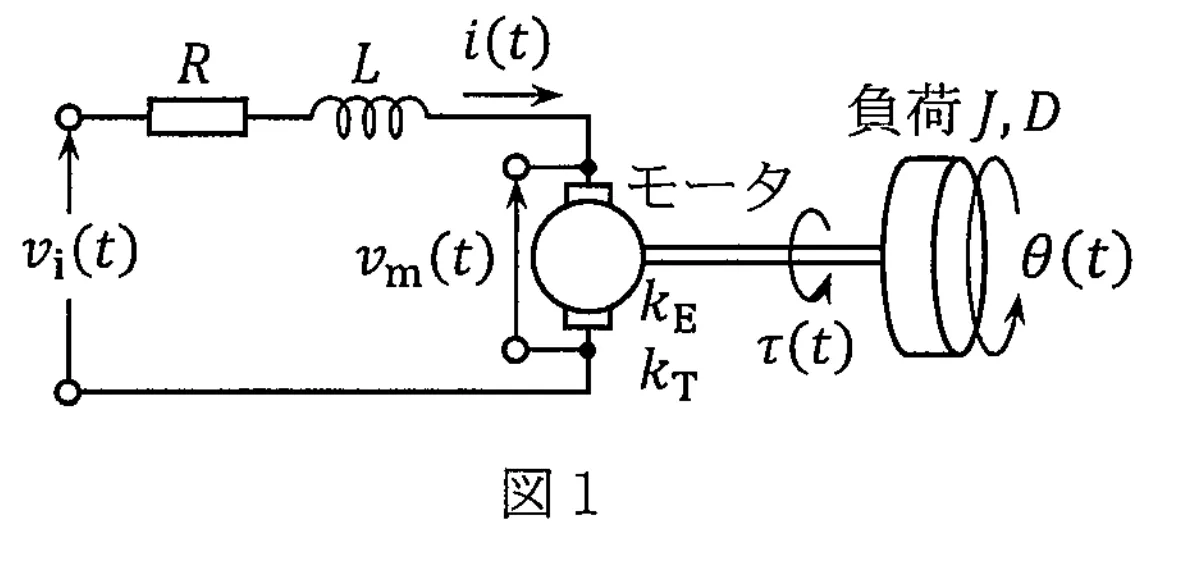
[1] 図1に示す直流サーボモータについて,以下の問に答えよ。なお, は入力電圧, は電気回路を流れる電流, はモータの逆起電力, はモータの発生トルク, は出力のモータ回転角度, は抵抗値, はコイルのインダクタンス, と はモータの逆起電力定数とトルク定数, と はモータの回転子と負荷を合わせた系の慣性モーメントと粘性摩擦係数である。
- 電気系の電圧と電流の関係を表す微分方程式を示せ。
- 機械系の回転運動を表す微分方程式を示せ。
- 入力 から出力 までの伝達関数 を求めよ。ただし,,,および初期値をすべてゼロとする。
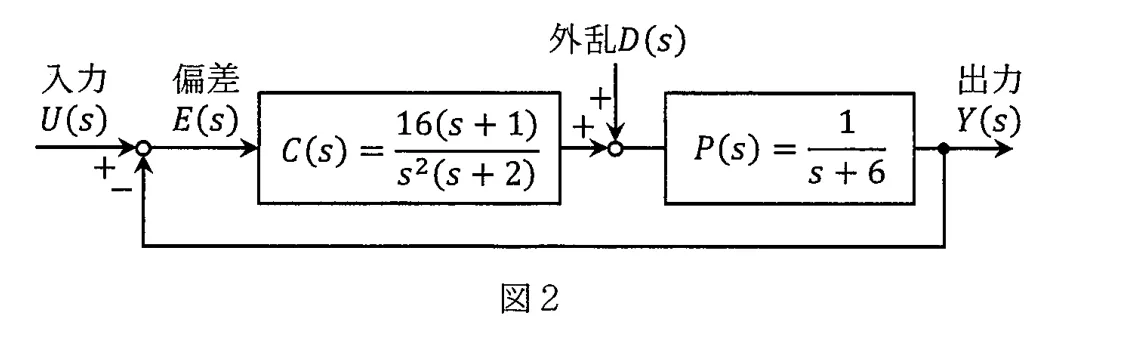
[2] 図2に示す制御系について,以下の問に答えよ。
- の折れ線近似ゲイン特性を描け。図中に折れ線の傾き,折点周波数,および角周波数 のときのゲインの値を明記せよ。
- の折れ線近似ゲイン特性が と交差するゲインクロスオーバー周波数を求めよ。
- 入力 と外乱 のそれぞれから偏差 までの伝達関数 と を求めよ。
- ラウスの安定判別法を用いて,系の安定性を判別せよ。
- および のとき,定常偏差の最大値を求めよ。
解答:
[1]
- キルヒホッフの電圧則より、
- ニュートンの運動方程式(回転運動)より、
- 与えられた関係式 と を微分方程式に代入し、初期値をゼロとしてラプラス変換する。
第2式より 。これを第1式に代入する。
よって伝達関数は、
[2]
-
折点周波数は と である。
低周波領域()では、積分要素 により傾きは 。
で の項により傾きが 変化し、 となる。
で の項により傾きが 変化し、 となる。
での近似ゲインは、。
(グラフは省略) -
ゲイン特性が と交差するのは の領域であると推測される。この領域での漸近線の式は、
これが になる条件は より 、すなわち 。
( は を満たすため妥当)
図2のブロック線図より、
これらを整理すると、
よって、
ここで であるから、
特性方程式は 。
ラウス配列を作成する。
: 1, 12, 16
: 8, 16, 0 → (1, 2, 0)に簡略化可能
: , → (5, 8)に簡略化可能
: , 0
: 8
第1列の要素 (1, 1, 5, 1.2, 8) はすべて正であるため、符号の変化はない。
したがって、システムは安定である。
重ね合わせの理を用いる。
入力 による定常偏差 は、 より
外乱 による定常偏差 は、 を伝達関数に代入した周波数応答から求められる。
振幅は
外乱による定常偏差は となる。この最大値は 。
総合した定常偏差の最大値は、
第一部分主要考察了直流伺服电机的数学建模,从电气回路的基尔霍夫电压定律和机械部分牛顿第二定律出发,得到微分方程,再通过拉普拉斯变换消除中间变量求得输入电压到输出角度的传递函数。
第二部分考察了控制系统分析。首先绘制控制器的波特图(折线近似),需要确定各个转折频率以及每段的斜率。接着计算穿越频率,即增益为 0dB 的频率,可以利用高频段的渐近线方程求解。然后利用方框图代数求取系统对输入和扰动的误差传递函数。判定稳定性使用了劳斯判据,列出劳斯表并检查第一列的符号变化。最后计算稳态误差,因为系统是线性的,所以利用叠加定理。对于抛物线输入,使用终值定理计算误差;对于正弦扰动,稳态误差也是一个正弦波,其幅值由误差传递函数在对应频率处的幅频特性决定,两者最大值相加即为总的稳态误差最大值。