時間関数 をラプラス変換した関数を のように書くことにする。
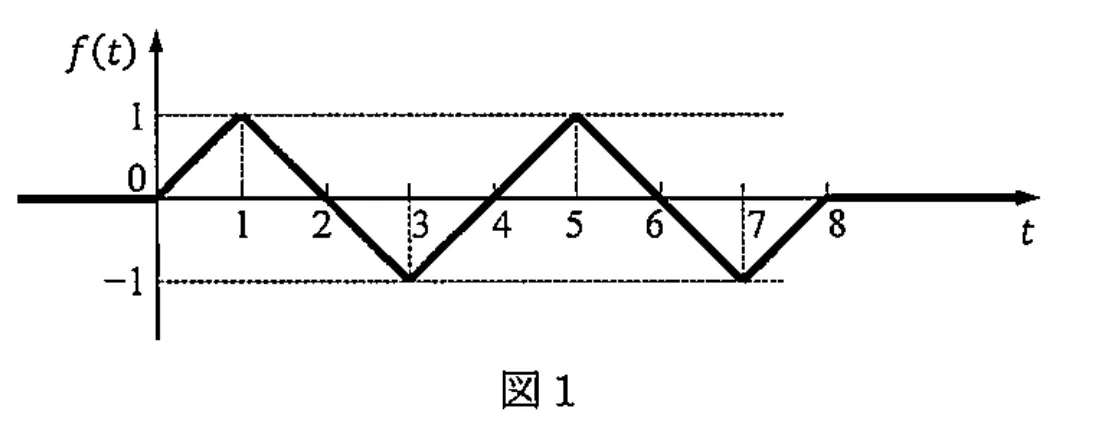
[1] 図1に示す時間関数 について,以下の問に答えよ。
- を区間に分けて,その区間ごとに の式を示せ。
- 区間 における関数を として, を求めよ。ただし, と のとき, とする。
- 区間 における関数を として, を求めよ。ただし, と のとき, とする。
- を求めよ。
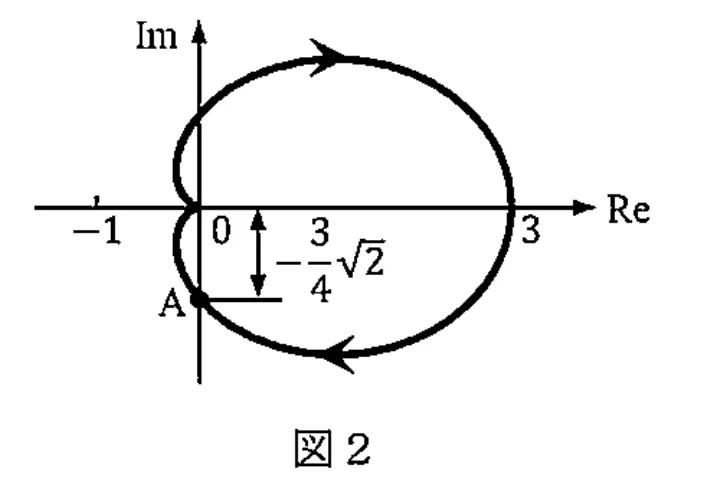
[2] 一巡伝達関数 のナイキスト線図が図2で与えられる直結フィードバック制御系について,以下の問に答えよ。ただし,図中の点 A では,角周波数 である。
6) として正しいものを以下の(a), (b), (c), (d)から選べ。また,選んだ理由を述べよ。ただし, は正の実数である。
(a) , (b) , (c) , (d)
7) 前問1) 中の の値を求めよ。
8) 系の閉ループ伝達関数 を求めよ。
9) 単位ステップ入力のときの出力の定常偏差を求めよ。
10) 単位ステップ入力のときの出力の最大値を求めよ。
解答:
[1]
1)
は単位ステップ関数 を用いて次のように表される。
両辺をラプラス変換して、
は を時間軸方向に だけ平行移動し、符号を反転させたものであるため、 が成り立つ。
ラプラス変換の推移定理より、
は において周期 の周期関数である。
1周期分の関数のラプラス変換は であるから、
よって、
[2]
1)
理由:図より において は有限値をもつため、原点に極をもつ (a) と (b) は不適。また のとき、(c) の場合は となり負の虚軸に接しながら原点へ向かうが、(d) の場合は となり負の実軸に接しながら原点へ向かう。図のナイキスト線図は負の実軸に接するように原点へ向かっているため、(d) が適する。
(d) より である。
図より で実部が であるから、 より 。
点 A () では虚軸上にあるため実部が となり、 より 。これより 。
点 A での虚部は であるから、
これを解いて 。
単位ステップ入力 に対する誤差 は である。最終値の定理より定常偏差は、
出力 を部分分数分解して逆ラプラス変換を行うと、
最大値を求めるために微分して と置くと、
で最初に になるのは すなわち のときである。
このとき出力は最大となり、
第一大题主要考察拉普拉斯变换的基础知识和分段函数的平移定理。由于函数是分段的线性折线函数,利用阶跃函数可以轻松表示出每一段的表达式并进行积分或直接使用公式求取变换。当分析整个周期函数的拉普拉斯变换时,通过利用推移定理计算单个周期的结果并加上周期函数的无穷等比数列求和公式,即可得到全局的表达式。
第二大题侧重于控制系统中的奈奎斯特图与闭环系统分析。通过观察奈奎斯特图中曲线的起点和高频极限处的渐近特征,可以判断开环传递函数原点处极点的个数及其阶数,从而快速筛选出正确的模型结构。结合图上给出的特殊点坐标,尤其是与虚轴的交点和实轴截距即可反求出传递函数中所有的未知参数。随后可以根据闭环传递函数的定义计算得到标准形式,再利用最终值定理即可求得位置误差常数和相应的稳态误差。在计算最大输出时,需要进行拉普拉斯逆变换得到时间域内的动态响应函数,然后对时间求导以寻找过冲峰值点对应的时刻,代回原函数便得到了最大值的精确解。