時間関数 をラプラス変換した関数を のように書くことにする。
[1]制御系の出力は回転角であり, で与えられている。以下の問に答えよ。
- 回転角の初期値 を求めよ。
- 回転角速度 を求めよ。
- 回転角速度の初期値 を求めよ。
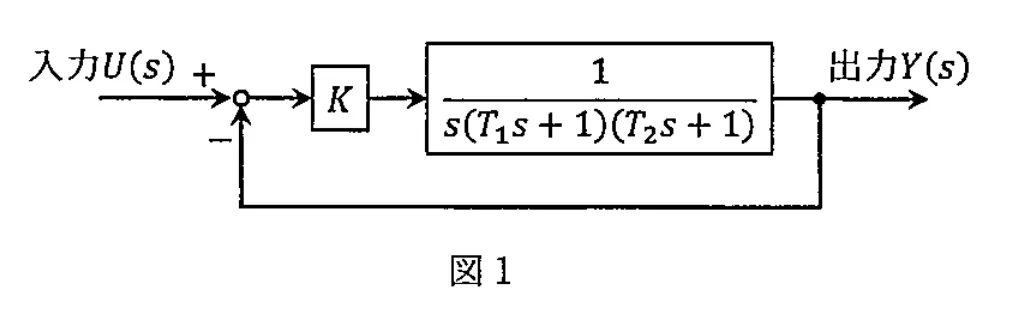
[2]図1に示す制御系について,以下の問に答えよ。ただし,図中の は,正の実数である。
- 一巡伝達関数(開ループ伝達関数) を求めよ。
- 入力 から出力 までの閉ループ伝達関数 を求めよ。
- ラウスの安定判別法を用いて,系を安定とするための の範囲を と を用いて表せ。
- のベクトル軌跡の略図を描け。
- のとき, のベクトル軌跡が点 で実軸と交わる。ナイキストの安定判別法を用いて,系を安定とするための の範囲を求めよ。
- の値の増大により,系の安定性・速応性・定常特性がどう変化するかを記述せよ。
解答:
[1]
-
初期値定理より、
-
回転角速度は回転角の微分であるため、ラプラス変換の微分定理を用いる。
-
初期値定理より、
[2]
1)
-
閉ループ伝達関数は より、
-
特性方程式は となる。
ラウス配列を構成する:
安定であるためには第1列の要素がすべて正である必要がある。 より、
-
を代入して展開すると、
のとき、位相は 、大きさは 。
のとき、位相は 、大きさは 。
実軸との交点は虚部が になる のときで、交点座標は である。
ベクトル軌跡の略図は、第3象限の無限遠から出発し、負の実軸と交わり、第2象限を通って原点に向かう曲線となる。
略図:第3象限の無限遠から出発し、負の実軸と交わり、第2象限を通り原点に収束する。 -
のとき交点が であることから、
任意の について、実軸との交点は となる。
ナイキストの安定判別法より、開ループ系は右半平面に極を持たないため、ベクトル軌跡が を包囲しないことが安定条件となる。
-
の増大による影響:
本题是一道典型的自动控制原理基础题,主要考查了以下几个知识点:
利用拉普拉斯变换的初值定理求时间响应的初始状态。求解角速度时需要利用拉普拉斯变换的微分性质,即 ,需要注意扣除初始状态的影响。
求解闭环传递函数以及利用劳斯判据(Routh-Hurwitz criterion)判断系统的参数稳定范围。
奈奎斯特图(Nyquist plot)的绘制与奈奎斯特稳定判据的运用。通过求取频率特性的实部与虚部,找到与实轴的交点,从而根据 点是否被包围来判定系统稳定性。
开环增益对闭环系统性能指标的影响。通常开环增益增加会使得系统的稳态误差减小(定常特性提升),响应速度加快(带宽高,速应性提升),但会导致系统的相位裕度和幅值裕度降低,使得稳定性变差。