時間関数 をラプラス変換した関数を のように書くことにする。
[1] 伝達関数が で与えられる系について,以下の問に答えよ。
- 入力を とするとき,出力 を求めよ。
- 入力を とするとき,出力 を求めよ。
- この系は有界入力有界出力 (BIBO: Bounded Input Bounded Output) 安定であるかをその理由とともに答えよ。
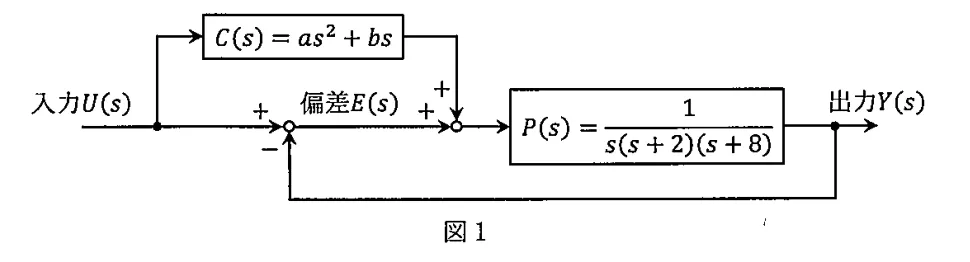
[2] 図1に示す制御系について,以下の問に答えよ。ただし,図中の と は,正の実数である。
- 入力 から出力 までの伝達関数 を求めよ。
- この系に等価な直結フィードバック制御系の一巡伝達関数 を求めよ。
- この系を2型の系,かつ単位加速度入力 のときの定常偏差をゼロとするための と の値を求めよ。
[3] 以下の制御法について,伝達関数を示すとともに,制御の特徴を安定性・速応性・定常特性の観点から記述せよ。ただし,比例ゲインを ,積分時間を ,微分時間を とする。
- PI制御
- PD制御
解答:
[1]
逆ラプラス変換より、
を用いて、
理由:伝達関数 の極 が虚軸上に存在するため。また、有界な入力 に対し、出力 は で発散するため。
[2]
- 偏差を とする。ブロック線図より、
これを について解くと、
よって、
- 直結フィードバック制御系の閉ループ伝達関数は であるため、 より、
よって、
- 系を2型の系とするためには、 の分母が を因数に持ち、 を因数に持たない必要がある。分母の の係数は0となるため、
このとき、 となる。
単位加速度入力 に対する定常偏差 は最終値の定理より、
定常偏差をゼロとするため、。
[3]
- PI制御
伝達関数:
特徴:
安定性:積分作用により位相遅れが生じるため、系の安定余裕が減少し安定性が悪化する傾向がある。
速応性:積分要素により過渡応答が遅くなる。
定常特性:低周波ゲインが無限大となるため、定常偏差をなくし定常特性を改善できる。
- PD制御
伝達関数:
特徴:
安定性:微分作用により位相進みが生じるため、系の安定余裕が増加し安定性が向上する。
速応性:高周波ゲインが増加するため、立ち上がり時間が短縮され速応性が向上する。
定常特性:直流ゲインを変化させないため、定常特性の改善効果はない。
解答主要使用了经典控制理论的方法来分析系统的响应与稳定性。在求解输出信号时,分别利用了拉普拉斯逆变换的基本公式以及含有极点重数的共振系统的逆变换公式。判断系统BIBO稳定性的关键在于闭环传递函数的极点位置,只要存在实部非负的极点即可判定系统不稳定,共振发散的物理现象也从时域上印证了这一点。在求解含前馈补偿的闭环传递函数时,将系统框图各节点信号转化为代数方程组可以有效避免视觉跟踪易造成的符号错误,而等效单位负反馈的开环传递函数则直接通过闭环传递函数反解得出。判断系统型数的依据是等效开环传递函数在原点处的极点个数,稳态误差则是通过拉普拉斯变换的终值定理求取。值得注意的是,为满足题意将加速度输入的稳态误差设为零计算出参数后,该系统在数学上已升至三型系统,这是使得该误差项收敛至零的必然代数结果。在PID控制器的理论分析中,主要是利用频率响应中积分带来的相位滞后与低频高增益,以及微分带来的相位超前与高频高增益,来论证它们对控制系统稳定性、响应速度和稳态精度的不同影响。