時間関数 をラプラス変換した関数を のように書くことにする。
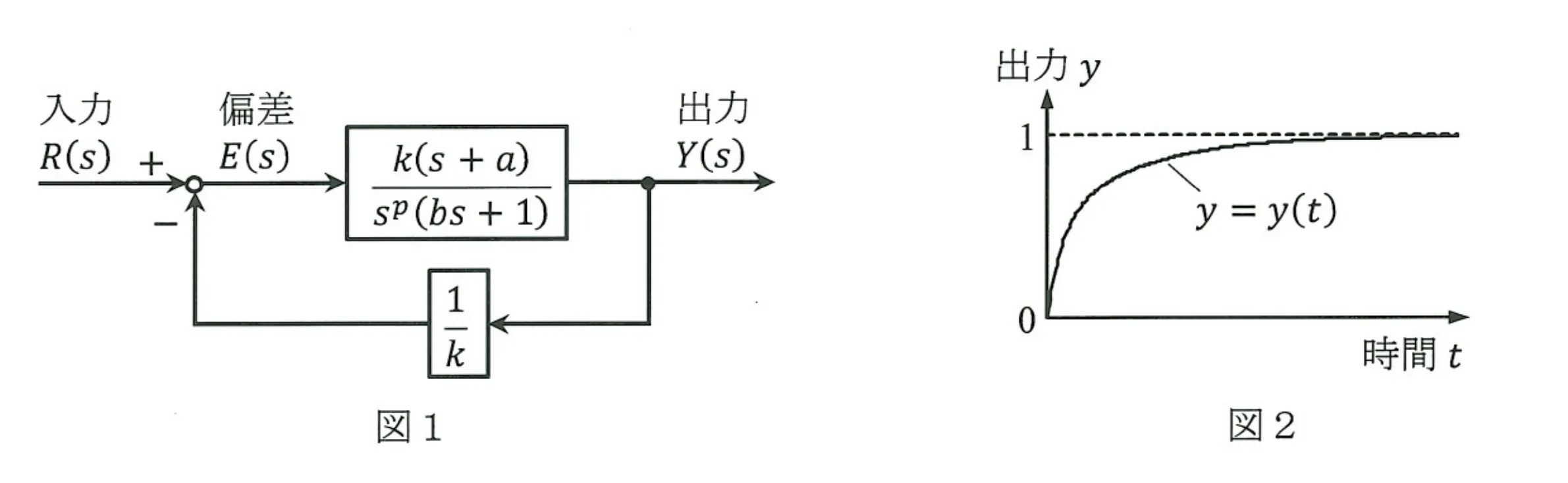
[1] ブロック線図を図1,単位ステップ応答を図2に示すフィードバック制御系について,以下の問に答えよ。ただし,図中の , , , は正の実数である。
- 入力 から出力 までの閉ループ伝達関数を求めよ。
- 入力 から偏差 までの伝達関数を求めよ。
- 単位ステップ入力のときの偏差を として,, , の値を求めよ。
- 問3)で求めた , , の値を用いて, の値を求めよ。
[2] 一巡伝達関数が となる直結フィードバック制御系について,以下の問に答えよ。ただし, は正の実数である。
- ゲイン余裕を とするための の値を求めよ。
- ステップ応答の定常状態が振幅一定の周期振動となる場合の の値を求めよ。
- 閉ループ制御系のすべての極の実部が より小さいときの の値を求めよ。
解答:
[1]
1)
前向き伝達関数を ,フィードバック伝達関数を とすると,閉ループ伝達関数 は,
偏差 は であるから,
をラプラス変換すると,
単位ステップ入力 のとき,問2)の結果より,
両式の分母の次数を比較すると より である。このとき,
係数を比較して,
これらを解いて,
最終値の定理と図2の単位ステップ応答の定常値より,
図2より であるから,
[2]
1)
開ループ伝達関数は である。
周波数伝達関数は,
位相交差角周波数 は虚部が0となる条件から,
このときのゲインは である。
ゲイン余裕が であるから,
閉ループ系の特性方程式は より,
ラウスの配列を作成する。
ステップ応答の定常状態が振幅一定の周期振動となるのは,特性方程式が純虚数根をもつ限界安定の状態である。したがって の行が0になればよく,
すべての極の実部が より小さい条件を求めるため, と変換し,すべての の極の実部が負になる条件を求める。
特性方程式に代入すると,
展開して整理すると,
ラウスの配列を作成する。
すべての根の実部が負となるためには,第1列の要素がすべて正でなければならない。
したがって,求める の範囲は,
本题主要考查自动控制原理中的闭环系统数学模型推导、时域稳态分析、频域分析及劳斯稳定性判据的应用。第一大题要求熟练化简方框图求出传递函数,并运用拉普拉斯逆变换和终值定理,将时间响应表达式与频域中的传递函数系数对应起来,从而推算出未知的系统参数。第二大题考查频率响应下的增益裕度计算,需要找到虚部为零的相位交叉频率并进而求解增益要求;此外还考察了通过变量代换平移系统的极点,再利用劳斯阵列求出让所有闭环极点实部均小于特定值的参数范围,展现了劳斯判据在指定相对稳定性裕度时的灵活性。