時間関数 をラプラス変換した関数を のように書くことにする。
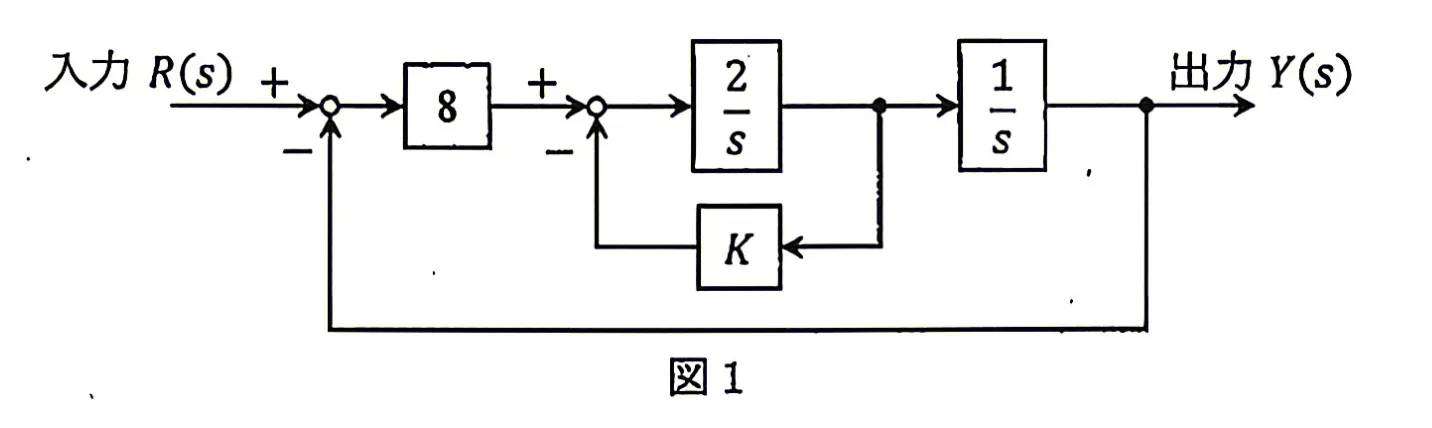
[1] 図 1 に示すフィードバック制御系について,以下の問に答えよ。ただし,図中の は非負の実数である。
- 一巡伝達関数(開ループ伝達関数) を求めよ。
- 入力 から出力 までの閉ループ伝達関数 を求めよ。
- 系が安定,安定限界,あるいは不安定となる場合について,それぞれの の値の範囲を示せ。
- ステップ応答が振動的である場合と振動的でない場合について,それぞれの の値の範囲を示せ。
- 単位ランプ入力のときの定常偏差と の値との関係を示せ。
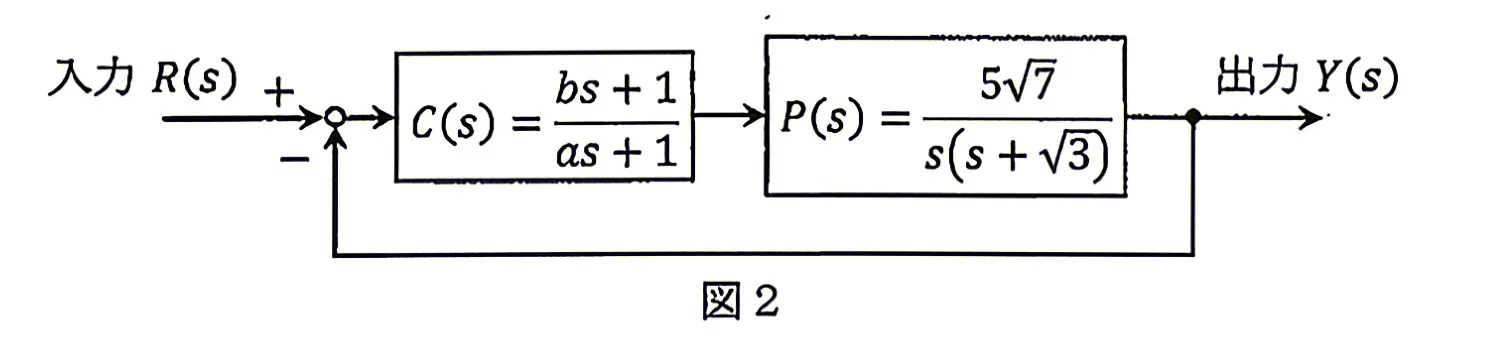
[2] 制御対象 に対して,補償器 を直列接続し,図2に示すフィードバック制御系を構成した。この系について,以下の問に答えよ。ただし, と は正の実数である。
- を位相進み補償要素とする場合について, と の大小関係,および位相進み角が最大となるときの角周波数 を示せ。
- 位相進み補償をした後のゲイン交差周波数を とし, となるときの と の値を求めよ。
(参考)逆三角関数の一階微分
解答:
[1]
1)
前向き要素の伝達関数を ,フィードバック要素の伝達関数を とすると,内側のループの伝達関数 は,
したがって,一巡伝達関数 は,
閉ループ伝達関数 は,
特性方程式は,
フルビッツの安定判別法より,系が安定となる条件は係数がすべて正であることなので,。
安定限界となるのは のときであり,。
不安定となるのは のときであるが,題意より であるため不安定となる の範囲は存在しない。
特性方程式の判別式 は,
ステップ応答が振動的となるのは根が複素数となる場合であり, のとき。
ステップ応答が振動的でないのは根が実数となる場合であり, のとき。
単位ランプ入力 のとき,定常位置偏差定数 は,
定常偏差 は,
[2]
1)
が位相進み補償器であるための条件は,零点が極より原点に近いことである。極は ,零点は であるから,
の位相角 は,
を で微分して0とおく。
より,
のとき, かつ 。
の条件と矛盾するため,位相角の定義を見直す。
において, とすると,
位相進みとするには である必要があり,
- の解答を訂正し, とする。
再び, と より,
より,。
。
これは を満たす。
这道控制理论题目包含了系统传递函数的推导、稳定性分析、瞬态响应特性、稳态误差计算以及频域补偿器设计等核心考点。第一部分通过方框图化简求取开环和闭环传递函数,然后利用劳斯-赫尔维茨判据确定系统的稳定性条件。系统阻尼比由特征方程的二阶项系数决定,据此可以判断阶跃响应是否具有振荡特性。利用静态速度误差系数可以求解单位斜坡输入的稳态误差。第二部分涉及相位超前校正器的设计。首先需要明确相位超前校正器的零极点分布规律,即零点应靠近原点,从而推导出参数 和 的大小关系。利用相频特性的求导可以找出最大相位超前角对应的频率 。最后,根据幅值穿越频率处的幅值条件 以及给定的频率值,联立方程即可解得校正器的参数 和 。在求解过程中需要注意验证所得参数是否满足超前校正的前提条件。