控制学 机械系统建模 传递函数 奈奎斯特稳定性判据 频域分析
時間関数 のラプラス変換された関数を のように書くことにする。
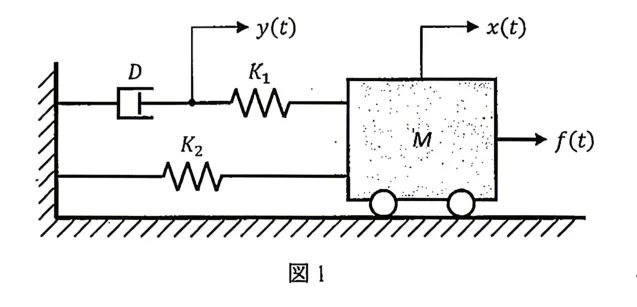
[1] 図1に示す機械系について,以下の問いに答えよ。ただし,質量 の台車は水平な床の上を摩擦なく動くものとする。 と はばねのばね定数, はダッシュポットの粘性減衰係数である。図示のように, は台車に加わる水平方向の外力, と は水平方向の変位である。, , ,およびそれらの導関数の初期値はゼロとする。
- 系の運動方程式を求めよ。
- を入力, を出力とする伝達関数 を求めよ。ただし,伝達関数を のように書け。ここで, と は係数である。
- 外力 を単位ステップ関数として, のときの変位 を求めよ。なお,系は安定なものとする。
[2] インパルス応答が となる開ループシステムに直結フィードバックを施して,制御系を構成した。この制御系について,以下の問いに答えよ。ただし, は正の実数である。
- 開ループ伝達関数を求めよ。
- ナイキスト線図における位相交差角周波数を求めよ。
- ナイキストの安定判別法を用いて,制御系を安定とするための の範囲を求めよ。
- 位相余裕を とするための の値を求めよ。
解答:
[1]
1)
[2]
1)
这道题目主要考察机械系统的数学建模以及控制系统中的频域分析和稳定性判据。在第一部分的机械系统建模中,关键在于选取合适的坐标并对系统中的各个元件进行受力分析。无质量点处的受力平衡是一个重要考点,弹簧和阻尼器的力在无质量点处必须完全抵消。求取传递函数时只需对运动方程进行拉普拉斯变换并消除中间变量即可,求解稳态值时利用终值定理可以直接通过传递函数求得,物理意义上相当于阻尼器不产生力,仅弹簧承受外力。
第二部分主要涉及开环和闭环系统的频域特性分析。通过对冲激响应进行拉普拉斯变换可以得到开环传递函数。寻找相位交叉频率需要将传递函数频域化并令虚部为零。奈奎斯特稳定判据要求开环频率响应曲线不包围点,因此只需计算相位交叉频率处的幅值即可求得增益的临界值。在设计特定的相位裕度时,通过相位条件求出对应的截止频率,再利用幅值条件解出系统所需的增益。