時間関数 のラプラス変換された関数を のように書くことにする。
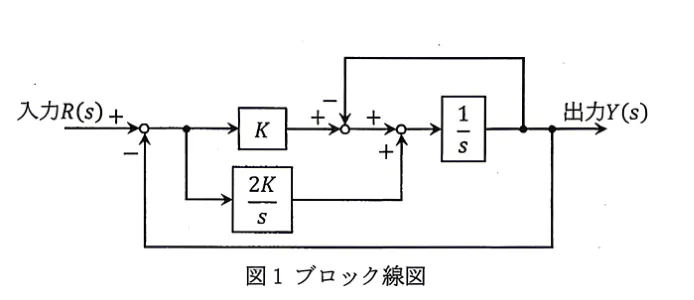
図1に示すブロック線図のフィードバック制御系について,以下の問いに答えよ。ただし,図中の は非負の実数である。
[1] 一巡伝達関数(開ループ伝達関数) を求めよ。
[2] 入力 から出力 までの伝達関数(閉ループ伝達関数) を求めよ。
[3] の値を から まで連続的に変化させたときに,系の特性方程式の根が複素平面上に描く軌跡を根軌跡という。実軸上の部分を除く根軌跡が円であることを証明せよ。また,円の中心座標と半径を数値で示せ。
[4] 根軌跡(実軸上の部分を含む)を描け。なお,図中に としたときの一巡伝達関数の極を 印,零点を 印で示すとともに,それらの座標値を示せ。
[5] ステップ応答が振動的である場合に,減衰係数が最も小さくなる の値を求めよ。
[6] 入力 が与えられるとき,定常状態における出力 を求めよ。ただし, とする。
解答:
[1]
ブロック線図より、マイナーループ(内側のフィードバックループ)の伝達関数 は、
コントローラの伝達関数 は、
したがって、一巡伝達関数 はこれらを直列結合したものであるから、
[2]
閉ループ伝達関数 は、
[3]
特性方程式は より、
これを について解くと、
根軌跡上の点 を ( は実数) とおく。 は実数であるため、上式の虚部は となる。
虚部を取り出して と置く。
実軸上の部分を除くため として両辺を で割ると、
平方完成を行うと、
これは複素平面上における円の方程式を表している。(証明終)
円の中心座標と半径は、
[4]
根軌跡の描画において、座標情報は以下の通りである。
のときの極と零点:
[5]
特性方程式 を標準形 と比較する。
減衰係数 を最小化する を求めるため、 で微分して と置く。
分子が となるため、
のとき であり、ステップ応答は振動的となる条件を満たす。
[6]
のとき、閉ループ伝達関数は となる。
入力 に対する定常応答を求めるため、周波数伝達関数 に を代入する。
分母分子を で割り、有利化する。
振幅ゲインと位相角は、
したがって、定常状態における出力 は、
本题是一道非常经典的控制工程综合题。首先需要通过方框图的代数运算化简系统,其中包含一个单位负反馈的内环,化简内环后再与前向通道的PI控制器相乘即可得到开环传递函数。利用开环传递函数求出闭环特征方程后,推导根轨迹方程的方法是把特征方程中的参数用复变数表示,并利用根轨迹上点的特征方程恒成立这一条件,分离实部与虚部,令虚部为零即可配方出圆的方程,从而得到圆心和半径。绘制根轨迹时通常只需标注开环极点和开环零点,并且利用相角条件判断实轴上的根轨迹区间。系统为二阶系统,阻尼比可以直接由特征方程系数比对得出,求极值只需对参数求导并令导数为零即可。最后求解正弦稳态响应属于频率响应的范畴,只需将传递函数中的复变量替换为虚数单位乘以输入信号的角频率,计算出该频率下的幅值和相角,将其分别乘加到原正弦信号的振幅和相位上即可得到最终结果。