時間関数 のラプラス変換された関数を のように書くことにする。
[1] ある制御系は,入力を ,出力を として,次の方程式で記述される。
この制御系について,以下の問に答えよ。
- ブロック線図を描け。
- 閉ループ伝達関数 を求めよ。
- 単位ステップ応答 を求めよ。
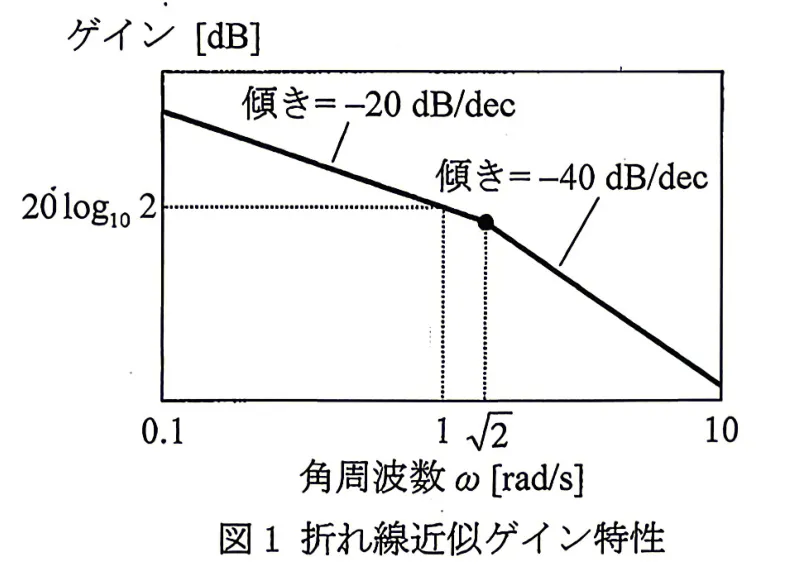
[2] 一巡伝達関数(開ループ伝達関数) の折れ線近似ゲイン特性が図1で与えられる直結フィードバック制御系(最小位相系)について,以下の問に答えよ。
- 一巡伝達関数 を求めよ。
- 位相余裕を求めよ。
- 補償器 を直列接続し,定常速度偏差を零とする。このとき,以下に示す補償器(a)と(b)のどちらを選ぶのが適切かを答えよ。またその理由を述べよ。なお, と は定数である。
(a)
(b)
(参考)ラプラス変換表
| 時間関数 | ラプラス変換された関数 | 時間関数 | ラプラス変換された関数 |
|---|---|---|---|
| デルタ関数 | |||
| ステップ関数 | |||
注) に付した「‘」と「(-1)」は,それぞれ一階微分と積分を表す。
解答:
[1]
- 与えられた時間領域の方程式を初期値ゼロとしてラプラス変換する。
ブロック線図は以下の通りである。
順伝達関数 は、
フィードバック伝達関数 は、
閉ループ伝達関数 は、
単位ステップ入力 より である。
係数を比較して、
これを解いて、 となる。
逆ラプラス変換を行い、 を求める。
[2]
1)
図1の折れ線近似ゲイン特性より、
低周波域()では傾きが であるため、原点に極を持つ1型系である。
折れ点角周波数は であり、ここで傾きが から に変化するため、一次遅れ要素が存在する。時定数を とすると、 より 。
したがって、一巡伝達関数 の形は
と表せる。
ゲインの式は であり、 におけるゲインが である。
折れ線近似において、 までの低域漸近線は であるから、
ゆえに、
ゲイン交点角周波数 は を満たす。
より、
位相特性 は、
位相余裕 は、
定常速度偏差 は、ランプ入力 () に対する定常偏差である。
定常速度偏差を零にするためには、 となる必要がある。
もとの は1型(分母に が1つ)であるため、(有限値)となる。
したがって、 が2型以上(分母に 以上)となるように補償器 を選ばなければならない。
(a) の はPD補償器(または位相進み補償)の形であり、積分要素を含まない。これを接続しても系は1型のままである。
(b) の はPI補償器(または位相遅れ補償)であり、原点に極(積分要素 )を持つ。これを接続すると系は2型となり、定常速度偏差が零となる。
第一大题考察了控制系统基本框图的绘制,传递函数的化简,以及系统阶跃响应的求解。把微分方程进行拉普拉斯变换后直接理清各个变量的依赖关系,不难画出带反馈的系统框图。闭环传递函数用前向通道除以一加开环传函求得。求单位阶跃响应时需要熟练掌握部分分式展开技巧,将分母二次项配方后,再利用查表法或者熟悉的拉普拉斯逆变换公式将频域表达式转回时域。
第二大题考察了伯德图与开环传递函数的对应关系,以及性能指标和校正装置的选择。从伯德图中低频段的斜率可以看出系统类型,转折频率则对应了一阶惯性环节的时间常数,根据图上给出的增益值可以反推系统开环增益。求解相角裕度需要先求出系统的截止频率,即幅频特性等于1的频率,然后代入相角表达式求解。第三问对于系统稳态误差的考察,要求稳态速度误差为零,意味着系统必须要有两个积分环节。既然原系统只有一个,那就必须引入 PI 控制器,所以选择包含积分环节的补偿器。```