[1] を逆ラプラス変換せよ。
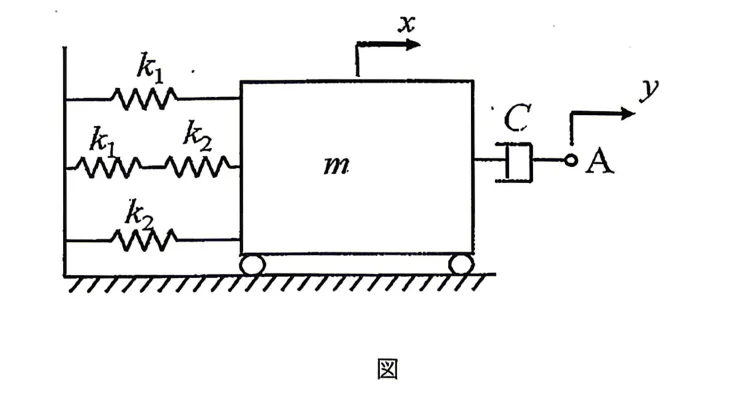
[2] 図のような振動系があり,力を作用させることで点Aは変位で動いている。ここで,は角速度であり,質量の台車は床の上を摩擦なく動くものとする。また,とを台車に接続されるばねのばね定数,をダンパの粘性摩擦係数とする。
以下の問に答えよ。
(1) この振動系の運動方程式を求めよ。
(2) を出力,を入力とする伝達関数を導け。
(3) 定常状態におけるの振幅と位相を求めよ。
(参考)ラプラス変換表
| 時間関数 | ラプラス変換された関数 | 時間関数 | ラプラス変換された関数 |
|---|---|---|---|
| デルタ関数 | |||
| ステップ関数 | |||
注) に付した「‘」と「(-1)」は,それぞれ一階微分と積分を表す。
解答:
[1]
逆ラプラス変換を行うと、
[2]
(1) 左側のばね系の等価ばね定数を とする。3つの支路が並列であるため、
質量 の変位を とすると、運動方程式は:
(2) 点Aにおける力は である。初期値を0としてラプラス変換すると、
運動方程式より、
代入して整理すると、
したがって、伝達関数 は、
(3) 入力 に対する の定常応答は により定まる。
振幅 と位相 は以下の通り。
(※ と表すこともできる)
补充说明:
第一题中,求解拉普拉斯逆变换的核心在于将被积函数的分母通过配方法转化为两个二次式的乘积,接着使用待定系数法进行部分分式展开。将得到的各项进一步配凑成拉普拉斯变换表中对应的指数阻尼正余弦函数标准形式,反向查表即可得到时域函数,最后将其化简为双曲函数以提升表达式的简洁度。
第二题考察了振动系统的力学建模与频率响应。首先需要正确计算由并联和串联构成的弹簧组的等效刚度。根据牛顿第二定律列出含阻尼项和弹簧项的微分方程时,应特别注意传力点A处的输入力 与阻尼器两端相对速度引发的阻尼力是一致的。在频域中求解系统的传递函数时,消去内部状态变量 即可得到输入与输出的直接关系。最后将 代入传递函数中,分别求取复数的模长与幅角,就能够完整描述其在正弦位移激励下的稳态力学响应特征。