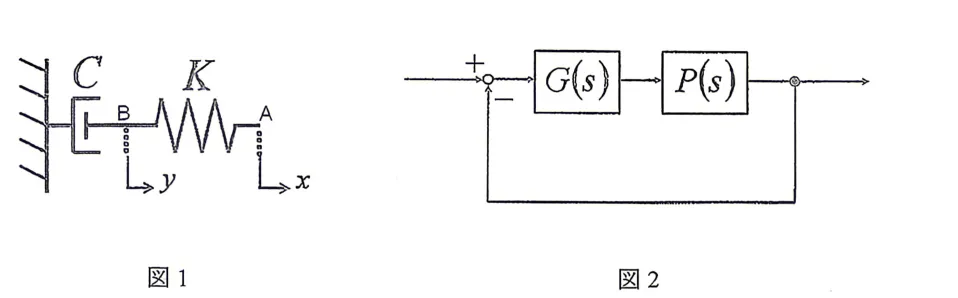
図1のように,ばね定数のばねと粘性係数のダンパが接続され,ダンパの一端が固定されている。ばねの右と左の端をそれぞれ点Aと点Bとし,時刻0から時刻の間で計測される点Aと点Bの変位をそれぞれとで表す(すなわち,および)。なお,ばねの質量,ダンパの質量および空気抵抗は無視できるものとする。
[1] ダンパに加わる力を,およびで表せ。
[2] ダンパに加わる力は次式から計算される。
式(1)に[1]の結果を代入して,図1のばね-ダンパ系の微分方程式を完成せよ。
[3] とをそれぞれ入力と出力とするとき,このばね-ダンパ系の伝達関数を求めよ。
[4] 入力をとするとき,出力を求めよ。
[5] 次式で表される要素を加えて,図2に示すようなフィードバック制御系を構成した。
およびとするとき,この制御系のゲイン余裕を求めよ。
(参考)ラプラス変換表
| 時間関数 | ラプラス変換された関数 | 時間関数 | ラプラス変換された関数 |
|---|---|---|---|
| デルタ関数 | |||
| ステップ関数 | |||
注) に付した「‘」と「(-1)」は,それぞれ一階微分と積分を表す。
解答:
[1]
ばねの変形量は である。ばねによって点Bに加わる力はダンパに加わる力と等しいため、
[2]
式(1)に[1]の結果を代入する。
または
[3]
[2]の微分方程式を、初期条件 のもとでラプラス変換する。
伝達関数 は以下のようになる。
[4]
を用いて出力のラプラス変換を求める。
部分分数分解を行う。
通分して係数を比較する。
係数比較により:
したがって、
ラプラス逆変換を行う。
三角関数の合成を用いると、
[5]
開ループ伝達関数 を求める。図2より、
周波数伝達関数 は、
位相交差周波数 は、虚部が0となる角周波数である。
より、 [rad/s]。
このときのベクトル軌跡の交点は、
ゲイン余裕 は、
(または真値で )
这是一道经典的机械系统控制理论题目,首先要求建立简单的弹簧-阻尼系统的数学模型。弹簧的受力由两端的位移差决定,根据力平衡原则可以列出微分方程。对方程进行拉普拉斯变换,利用零初始条件可以很容易地得到输入位移到输出位移的传递函数,这是一个典型的一阶惯性环节。当输入为正弦信号时,求系统的时间响应需要用到部分分式展开以及反拉普拉斯变换。输出由瞬态响应(指数衰减项)和稳态响应(与输入同频的正弦波)组成,稳态项可以通过频域直接求得。
最后一问考察了闭环系统的相对稳定性指标之一:增益裕度。首先写出系统的开环传递函数,将其转化为频率特性。相位交界频率是指开环相频特性达到 时对应的角频率,在数学上等价于使得开环频率特性的虚部为零的角频率。计算出该频率下的开环幅值,增益裕度即为其倒数(通常用分贝表示)。这反映了系统增益还可以增大多少才会使闭环系统处于临界稳定状态。