[1] 伝達関数 にインパルス入力が与えられるとき,出力を時間 の関数で表せ。
[2] 以下の図に示すフィードバック制御系について考える。下の図中で および とするとき,以下の設問に答えよ。
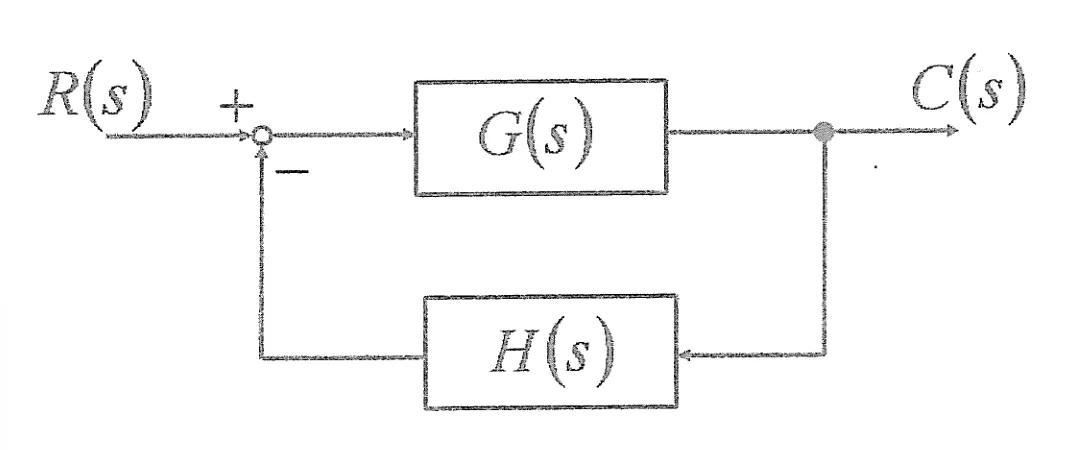
(1) 開ループ伝達関数を求めよ。
(2) 開ループ伝達関数のベクトル軌跡の略図を描け。
(3) ナイキストの安定判別法を用いて,フィードバック制御系が安定となるための の範囲を求めよ。
(4) のときのゲイン余裕を求めよ。
(参考)ラプラス変換表
| 時間関数 | ラプラス変換された関数 | 時間関数 | ラプラス変換された関数 |
|---|---|---|---|
| デルタ関数 | |||
| ステップ関数 | |||
注) に付した「‘」と「(-1)」は,それぞれ一階微分と積分を表す。
解答:
[1]
インパルス入力を とすると、出力 は伝達関数そのものになる。
これを部分分数に展開する。
各係数は以下のように計算される。
を代入して を求める。
したがって、
逆ラプラス変換により、時間 の関数としての出力は以下となる。
[2]
(1)
開ループ伝達関数 は と の積として求められる。
(2)
を代入し、実部と虚部に分ける。
のとき、 となる。
のとき、虚部が となり、 となる。
のとき、 となり、位相角は に漸近する。
(3)
フィードバック制御系が安定であるための条件は、ナイキスト軌跡が臨界点 を時計回りに包囲しないことである。
開ループ伝達関数 は右半平面に極を持たないため、ベクトル軌跡は点 の右側を通過する必要がある。
交点の実部は であるから、以下の条件を満たす必要がある。
また、 を前提とするため、安定となる の範囲は以下となる。
(4)
のとき、位相交差周波数は である。
このときのベクトル軌跡と実軸との交点の大きさは、
したがって、ゲイン余裕 は以下のように求められる。
补充:
传递函数在单位脉冲输入下的响应即为该系统传递函数的拉普拉斯逆变换,利用部分分式分解可将其化简为几个基本环节的叠加,这要求熟练掌握常见函数的拉普拉斯变换对。对于控制系统的频域分析,开环传递函数构成了系统的分析基础。奈奎斯特图即频率响应在复平面上的极坐标图,其绘制重点在于确定起始点、结束点以及与坐标轴的交点。本题中的三阶系统存在积分环节,因此低频渐近线垂直于实轴。利用奈奎斯特稳定性判据时,由于开环没有右半平面的极点,只需要开环频率特性的曲线不包围负一加零接点即可,从而解出增益的范围。增益裕度反映了系统在开环相位达到负一百八十度时允许增益增大的倍数,通常用分贝作为单位来衡量。