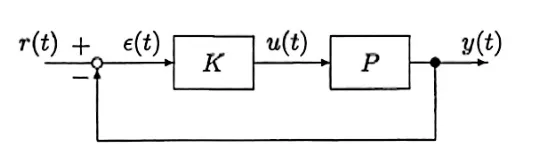
下のブロック線図で表される閉ループ制御系について考える.ブロック , の入出力特性はそれぞれ式 (1), (2) のとおりである.ただし は時刻を表す.
- 閉ループ伝達関数 を求めよ.ただし , はそれぞれ , のラプラス変換であり, はラプラス変数とする.
- のときの閉ループ系の極を求めよ.
- 閉ループ系が安定となる の範囲を求めよ.
- 正弦波入力 を与えたときの閉ループ系の定常出力を とする.閉ループ系が安定であり,かつ, となる の範囲を求めよ.
解答:
初期値を0として式(1),(2)をラプラス変換すると,
ブロック , の伝達関数はそれぞれ , である.
閉ループ伝達関数 は,
のとき,閉ループ系の特性方程式は より,
よって,極は である.
特性方程式は .ラウスの表を作成する.
| |
| |
| |
| |
ラウスの安定判別法より,第1列の要素がすべて正であれば系は安定となる.
したがって,安定となる範囲は,
入力 の角周波数は である.
定常出力の振幅 は,伝達関数の周波数応答のゲイン で与えられる.
振幅 は,
となる条件は,(安定条件より であるため)
これと,問3の安定条件 を同時に満たす範囲を求める.
这道综合控制理论题目涵盖了传递函数的建立、极点求解、稳定性分析以及频率响应的计算。第一问要求闭环传递函数,首先需要对给定的时域微分方程在零初始条件下进行拉普拉斯变换,求出控制器和被控对象的传递函数,然后代入负反馈闭环传递函数的标准公式计算化简。第二问求解闭环极点,也就是令第一问得到的闭环传递函数的分母多项式即特征方程等于零,代入具体的参数值后,通过分组分解法即可解出这个三次方程的三个根。第三问考察劳斯稳定判据,需要根据特征方程列出劳斯表,系统稳定的充要条件是劳斯表第一列的所有元素均大于零,由此可以解出控制增益的取值范围。第四问涉及系统的频率特性,当系统受到正弦信号输入时,其稳态输出仍然是同频率的正弦波,且输出的幅值等于闭环传递函数在该频率点处的频率特性的模,将角频率代入传递函数求出模值的表达式,结合题目给出的幅值小于1的条件求解不等式,最后必须强调的是,计算稳态响应的前提是系统自身必须稳定,所以最终的参数范围需要与第三问得到的稳定范围求交集。