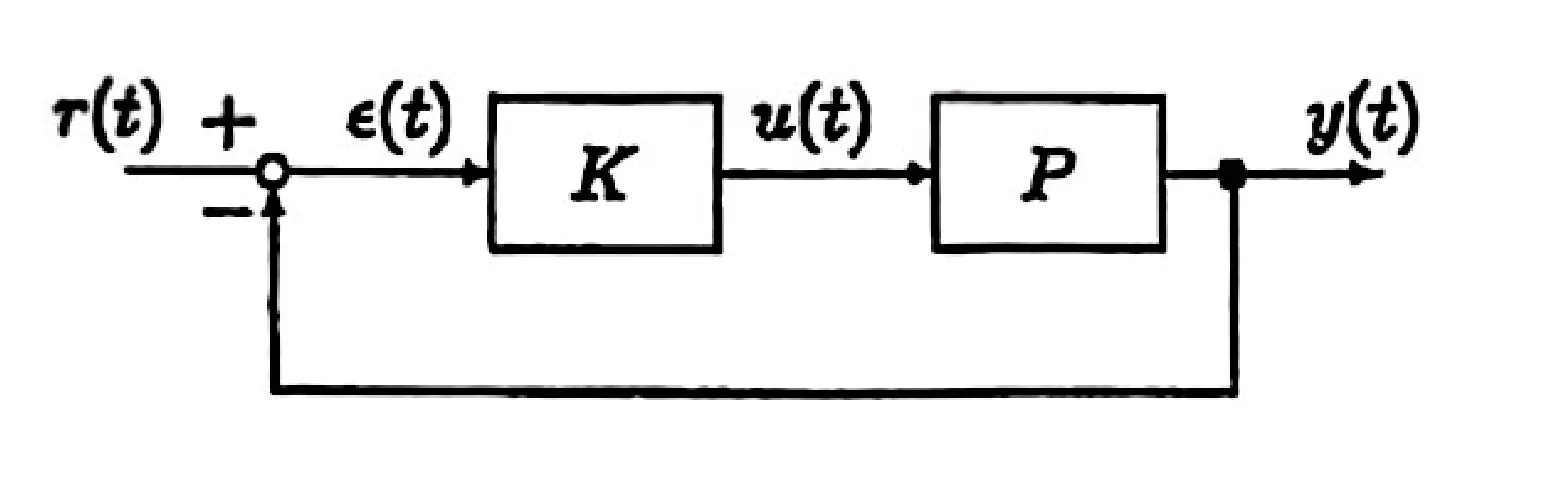
下のブロック線図で表される閉ループ制御系について考える.ブロック , の入出力特性はそれぞれ式 (1), (2) のとおりである.ただし は時刻を表す.
- 閉ループ伝達関数 を求めよ.ただし , はそれぞれ , のラプラス変換とする.
- の単位ステップ入力を与えたときの応答 を求めよ.
- の単位ステップ入力を与えたときの を求めよ.
- の単位ステップ入力を与えたときの のオーバーシュートを求めよ.
- 周波数伝達関数 の位相 について, を求めよ.なお, は角周波数であり, とする.
解答:
1.
式(1), (2)をラプラス変換する:
開ループ伝達関数
閉ループ伝達関数 は:
より:
部分分数分解を行う:
逆ラプラス変換により:
最終値の定理を用いる,あるいは より:
を で微分して極大値をとる時間を求める:
このときの最大値は:
オーバーシュートは最大値と定常値の差であるため:
を代入する:
のとき,分子の位相は に漸近し,分母の位相は に漸近する.
补充:
本题是典型的自动控制原理综合题,涵盖了从建立数学模型到时域及频域指标计算的全过程。题目给出的积分环节表明控制器K是一个PI(比例积分)控制器,而受控对象P则是一个一阶惯性环节。通过对微积分方程进行拉普拉斯变换可以很快得到两者的传递函数。由于开环传递函数中含有一个积分环节,该系统属于I型系统,因此在面对阶跃输入时,其稳态误差必然为零。在求解超调量时,除了可以直接套用二阶系统的标准公式,更本质的做法是利用此前求出的时域响应表达式,通过求导寻找响应曲线的第一个峰值时间,代入后再减去系统的稳态值即可。关于高频时的相角极限,可以利用系统闭环传递函数的零极点分布特征直接判断,分母最高次幂与分子最高次幂的差值为1,因此相角在高频时趋近于负90度。