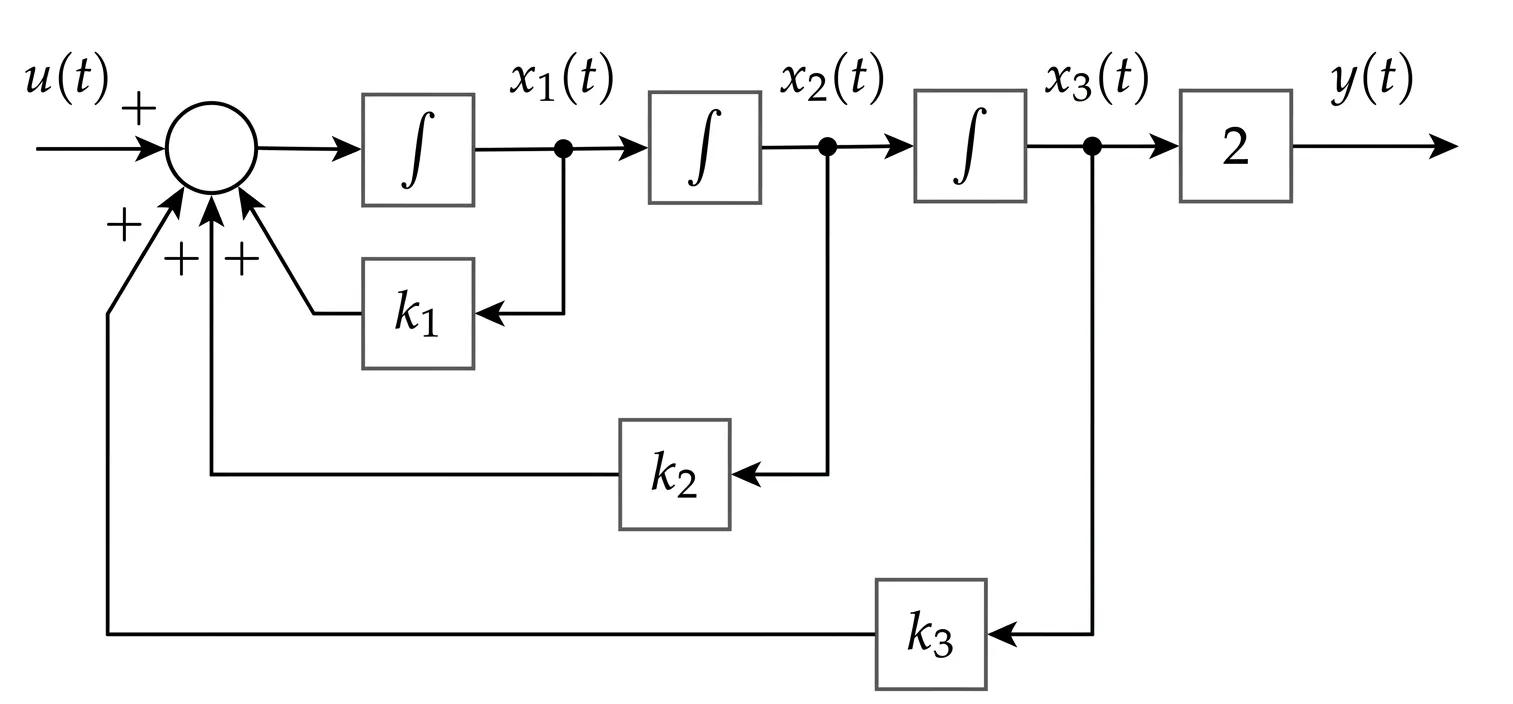
上のブロック線図で示される系について下記の設問に答えよ。
図中の 、 、 は定数である。
(1) 状態方程式と出力方程式をベクトル・行列形式で求めよ。
ただし、入力は 、出力は であり、状態変数は とせよ。
(2) この系を漸近安定にする 、 、 の条件を求めよ。
(3) この系の極が 、 、 に配置されるように 、 、 を定めよ。
解答:
(1)
ブロック線図中の各積分器の入出力関係より、以下の微分方程式を得る。
また、出力方程式は
これらをベクトル・行列形式でまとめると、
(2)
系が漸近安定であるための条件は、システム行列 の特性方程式の根がすべて左半平面に存在することである。
特性方程式は
ラウス・フルビッツの安定判別法を適用し、ラウス配列を構成する。
漸近安定であるためには、第1列の要素がすべて正でなければならない。
よって、求める条件は
(3)
指定された極から、希望特性方程式は
(2)で求めた特性方程式の各係数と比較して、
よって、
这道题是控制工程中关于状态空间模型的经典系统分析与综合问题。
第一问考察如何从系统框图提取状态空间方程。解题的关键在于明确积分器的物理数学意义,即积分器的输入等于其输出变量的一阶导数。通过观察框图中反馈信号的汇聚点(求和节点),可以清晰地写出输入变量及各个状态变量到各个积分器输入端的代数表达式,最后整理为标准的矩阵相乘形式即可。
第二问考察使用状态方程判断系统的渐近稳定性条件。首先利用系统矩阵求出对应的特征多项式,由于得到的是一个标准的三次方程,因此最简便有效的方法是引入劳斯稳定判据。列出劳斯表后,令表格第一列的所有元素严格大于零,即可解得各个常数参数必须满足的不等式组。在此需要注意符号的化简方向,例如第一列第三项的分母已知为正,推导时只需令其分子大于零即可。
第三问是极点配置问题。直接利用给定的三个闭环极点,相乘展开构造出目标特征多项式。将其与第二问中含有待定参数的系统特征方程对应的幂次系数进行一一比对,就可以直接计算出实现该极点配置所需的三个反馈增益的具体数值。