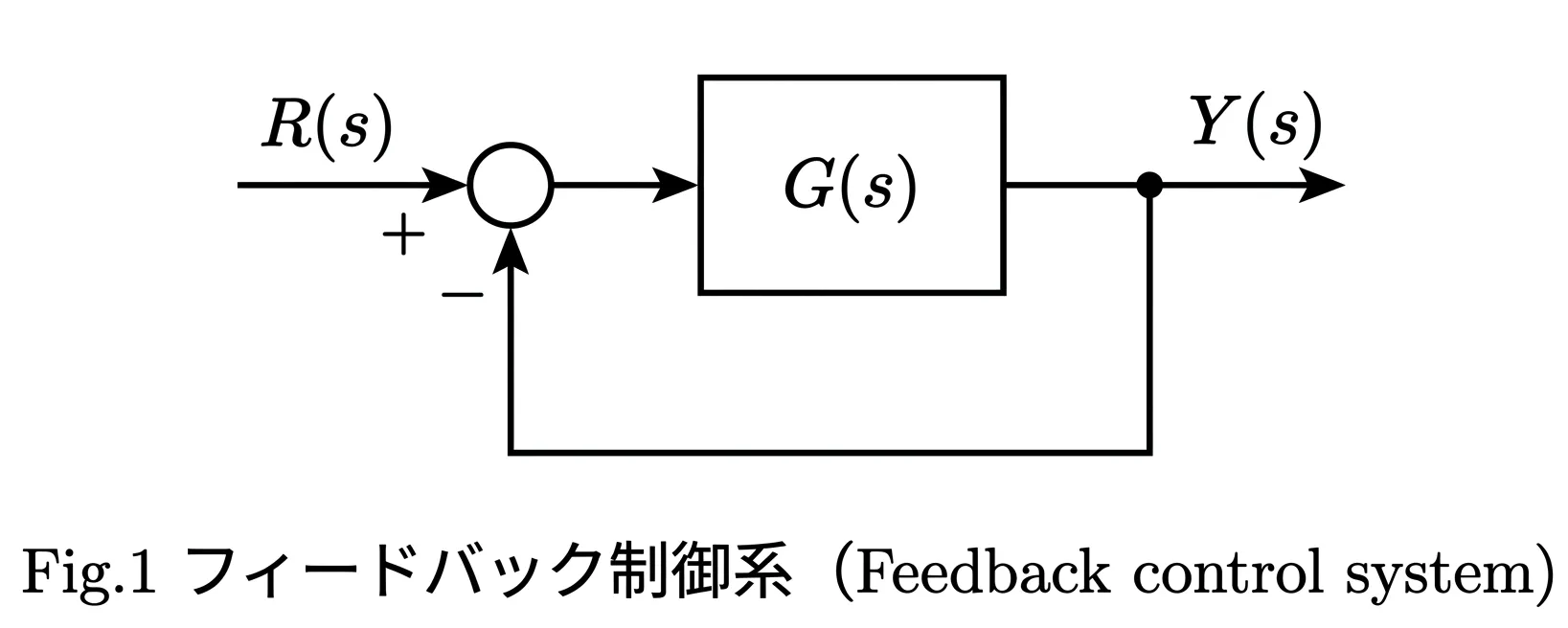
Fig.1のフィードバック制御系を考える。はラプラス変数、は制御対象の伝達関数、とは目標値と制御量のラプラス変換である。は角周波数、は虚数単位である。
(1) 伝達関数を、を用いて表せ。
(2) 制御対象の周波数応答は、振幅比と位相角を用いて、と表される。フィードバック制御系の周波数応答をと表すとき、とをとを用いて表せ。ただし、を用いないこと。
(3) のとき、を、を用いて表せ。ただし、を用いないこと。とする。
(4) のとき、を、とを用いて表せ。ただし、を用いないこと。また、がとなるの値を求めよ。とする。
解答:
(1)
ブロック線図より、 が成り立つ。
(2)
閉ループ伝達関数の周波数応答は である。
振幅比 は、
位相角 は、分母分子に共役複素数を掛けて整理すると、
より、
(3)
開ループ周波数応答 より、
閉ループ周波数応答は より、
(4)
より、
(2)の結果に代入すると、
となる条件は、分母がゼロとなることである。
这道题目考查了经典控制理论中单位负反馈控制系统的闭环传递函数及其频率响应特性的求解。第一问直接通过闭环系统方框图代数化简即可得到闭环传递函数。第二问要求由开环系统的幅频和相频特性推导闭环特性,只需要将指数形式的开环频率响应代入第一问公式,利用欧拉公式展开为实部和虚部形式求取模长和幅角即可。第三问和第四问分别给出了典型的一阶惯性环节和纯滞后环节的具体开环传递函数,只需用同样的方法将连续域的s替换为频域的jω,求出对应环节的幅值比与相位角,计算闭环模长无穷大时就是寻找使分母为零的角频率条件,利用简单的三角方程即可解出纯滞后系统发生谐振或失稳的临界频率。