(1)以下に示すフローチャートは、減衰のない多自由度系の連成振動を取り扱うときに用いられるモード解析による振動解析の手順を示したものである。①〜⑦にふさわしいと思われる学術用語を記入せよ。
- 運動方程式の定式化
↓ - 調和運動に対応する[①]を導出する
↓ - [①]に対応する[②]を導出する。[②]をもとにモード図を描くことができる
↓ - [②]から、振動モード特性を表す行列である[③]を導く
↓ - [③]を用いて、運動方程式の剛性マトリクスの非対角項が0となるよう[④]する
↓ - [⑤]座標系で記述した運動方程式の一般解を求める
↓ -
- で求めた解を[⑥]座標系での解に変換する
↓
- で求めた解を[⑥]座標系での解に変換する
- [⑥]座標系で記述された解に[⑦]を適用し、振幅と位相を決定する
↓ - 振動応答の決定
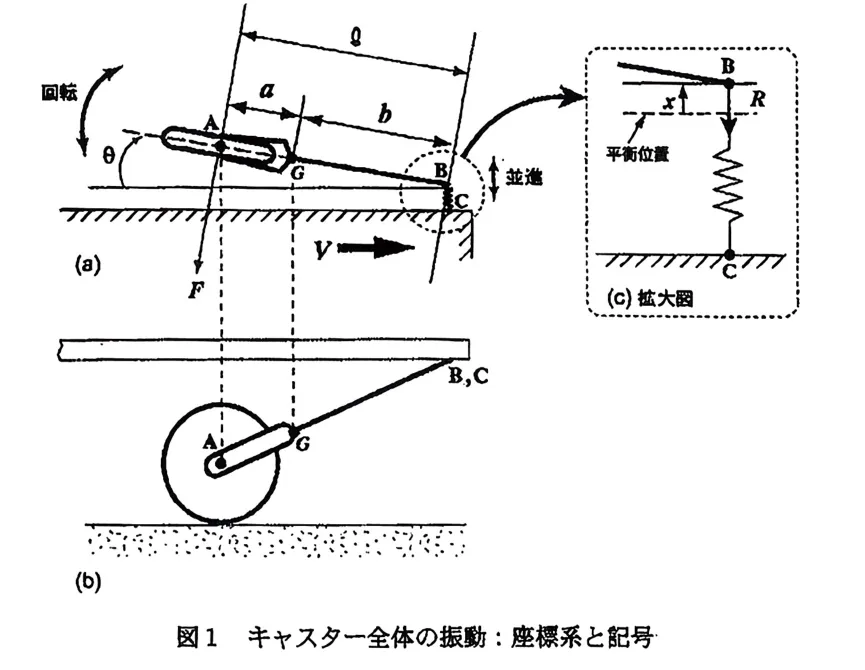
(2)図1は速度で走行している台車のキャスター及びキャスターの取り付け部(以下では、キャスター及びキャスターの取り付け部をキャスター全体と呼ぶ。)を拡大したものである。キャスター全体の振動は並進運動と回転運動の連成によって発生する。キャスター全体の安定性に関する以下の設問①〜④に答えよ。図中、およびは、それぞれ平衡位置からの並進運動の変位と回転運動の回転角である。キャスターには車輪に垂直な方向に摩擦力が作用する。また、キャスターが取り付けられている支柱をばねとしてモデル化すると、支柱の変形による復元力は点に発生する。ここで、は微小として、重心の並進運動および重心周りの回転運動の運動方程式を求めよ。ただし、キャスターの中心と重心までの距離を、から取り付け点までの距離を、キャスターの取り付け点とキャスター中心までの距離を、支持部材の重心周りの慣性モーメントを、キャスターと支持部材を合わせた質量をとせよ。また、重力は図(a)において紙面直角方向に作用するものと考えよ。
並進方向:[ ① ]
回転方向:[ ② ]
これは、に関する2自由度振動系の運動方程式となる。
次に、復元力と支柱の平衡位置からの変形量との間には、
なる関係があり(ただしは定数)、さらに、キャスターの中心軸方向の速度の連続性から
なる関係があるので、先に求めた、2自由度系の運動方程式とこれらを合わせた、合計4つの式から、キャスター全体の安定性を調べることができる。
ここで、
を代入してに関する特性方程式を求めると
[ ③ ]
となる。この式を元に、安定条件を求めると
[ ④ ]
を得る。
解答:
(1)
① (または 固有角振動数 / 固有値)
② (または 固有モード)
③
④ (または 非連成化)
⑤ (または 正規 / モード)
⑥
⑦
(2)
①
②
③
④
这道题包含两部分:无阻尼多自由度系统的模态分析理论,以及车辆动力学中经典的偏置脚轮摆振(Caster Shimmy)稳定性分析。
第一部分考察模态分析的标准流程。在建立系统的质量和刚度矩阵后,通过求解特征值问题可求得固有频率(特征值)和固有振型(特征向量)。接着将特征向量按列拼凑成模态矩阵,利用该矩阵作为变换矩阵对原运动微分方程进行坐标变换,使得耦合的刚度(和质量)矩阵对角化。这样就可以在主坐标系(模态坐标系)下解出各阶独立的模态响应,随后通过逆变换转换回物理坐标系,并利用初始条件确定具体的振幅与相位系数。
第二部分考察脚轮摆振系统的非完整约束动力学建模。首先需要明确系统的几何运动学关系。根据题目给定的恢复力方程式(1)可知, 严格对应于支点 的横向位移;而根据速度连续性约束方程式(2)(即车轮在接触点无侧滑的运动学条件),可以逆推出题目中旋转角 的正方向为顺时针(即使得车轮中心 在旋转时相对支点向下方/负方向移动)。因此,重心 的横向位移可表示为 。
在确定了运动学坐标后,对重心 应用牛顿第二定律,受力包括支点处沿负向的弹簧恢复力 以及车轮处沿负向的侧向摩擦力 。对重心 取矩,应用欧拉方程(注意 产生顺时针正力矩, 产生逆时针负力矩),即可分别得到平移和旋转的运动方程式 ① 和 ②。
接着消去中间变量进行求解。将 代入,并通过旋转方程将摩擦力 表出,代入平移方程中即可消去 ,得到一个关于 和 及其导数的方程。将指数形式的试探解式(3)代入该方程以及约束方程式(2)中,利用代数方程消去模态振幅幅值比 ,整理后即可得到关于 的三次特征多项式方程 ③。
最后,利用劳斯-赫尔维茨(Routh-Hurwitz)稳定性判据判断系统的稳定性。对于三次方程 ,系统所有特征根实部为负(即系统稳定)的充要条件为各项系数均大于零,且满足 。将三次方程的系数代入该不等式并化简,即可得到保证系统不发生发散性摆振的结构参数条件 。