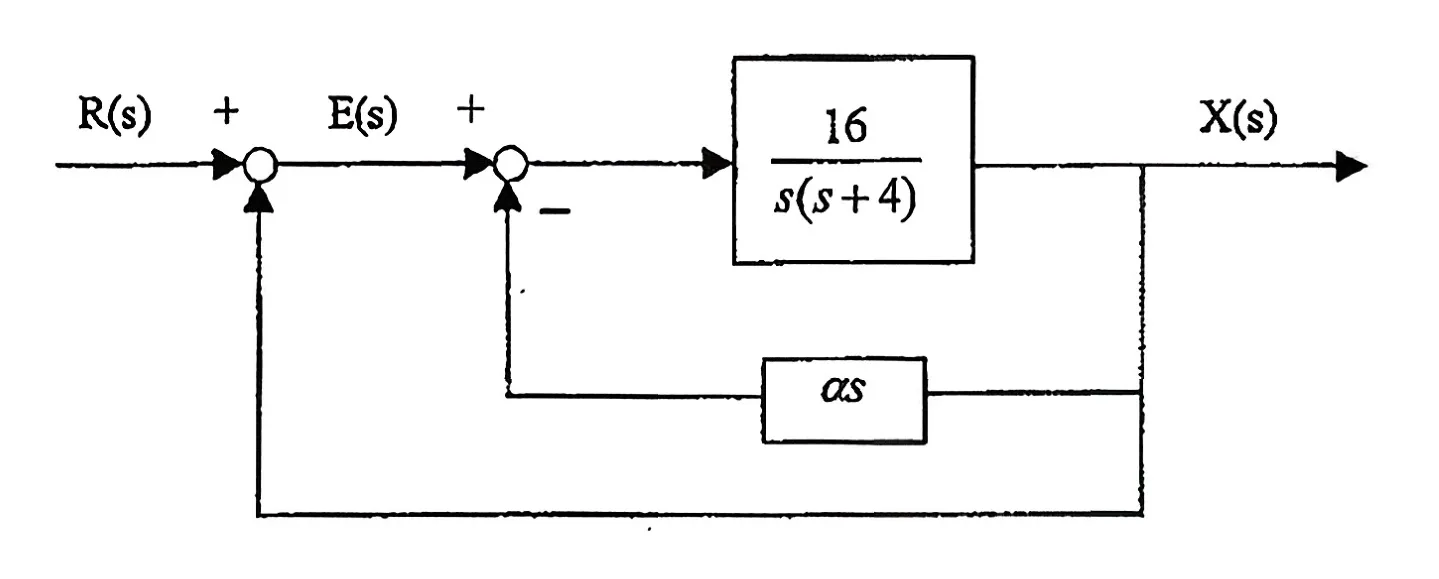
上図は、入力電流 E(s)から出力回転角 X(s)への開ループ伝達関数 が、
で表されるサーボモータにおいて、補償要素 による速度フィードバック補償を行った場合の、回転角に関するフィードバック制御系のブロック線図である。ただし、 は、
を満たす定数である。
(1) 目標値 R(s)から出力回転角 X(s)への閉ループ伝達関数 G(s)を求めよ。
(2) 回転角に関する制御系は二次系となるが、その減衰比(臨界減衰に対する比)を求めよ。
(3) 回転角に関する制御系の単位ランプ入力に対する定常偏差を求めよ。
解答:
(1)
ブロック線図より、各信号の関係は以下のように表される。
上記を整理して を消去する。
閉ループ伝達関数 は、
(2)
二次系の標準形 の分母多項式と比較する。
(3)
制御系の誤差 は次式となる。
単位ランプ入力 に対する定常偏差 は、最終値の定理を用いて求める。
这道题考察带速度反馈的闭环控制系统分析。首先需要化简系统的方框图,可以将内环的速度反馈和外环的单位负反馈结合,或者通过直接写出各个节点信号的代数关系求出总的闭环传递函数。接着对比标准二阶系统的特征方程,可以直接提取出无阻尼自然频率和阻尼比。计算单位斜坡输入的稳态误差时,由于输入为斜坡函数,可以利用终值定理对误差传递函数求极限得出结果,也可以先求出等效外环的开环传递函数并计算速度误差静态系数,稳态误差即为该系数的倒数,两种方法得出的结果一致。