図1のブロック線図(はラプラス演算子)に示す対象を制御することを考える.ここで,定数とする.このとき,以下の問いに答えよ.
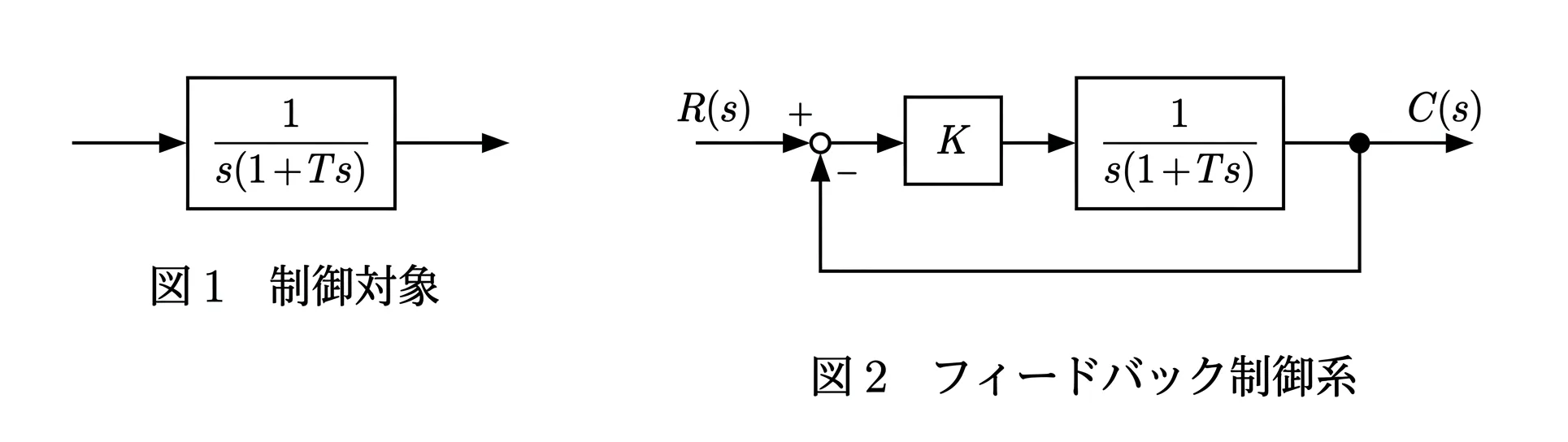
(1) 図1に示す制御対象の安定性を判別せよ.
(2) 図2に示すフィードバック制御系(目標値,制御量)を組むことを考える.ここで,パラメータとする.このフィードバック制御系の根軌跡を描け.
(3) パラメータの値によって,図2のフィードバック制御系の特性がどのように変わるか,描いた根軌跡に基づき簡潔に説明せよ.
解答:
(1)
制御対象の伝達関数 の極は である。
(虚軸上)に極をもつため、
(2)
閉ループ系の特性方程式は、
根の公式より、閉ループ極 は、
のとき、根は の実数。
のとき、根は実部が の複素共役。
したがって、根軌跡は以下のようになる。
(3)
(2)の根の式より、 において極の実部は常に負( または )であるため、系は常に漸近安定である。
根軌跡の分岐点 を境に特性が変化する。
这道题主要考察了线性控制系统中的稳定性分析和根轨迹法。第一问针对开环系统,通过观察传递函数的分母可以发现系统有一个位于原点的极点,这在控制理论中意味着系统处于临界稳定状态,不具备渐近稳定性。第二问要求绘制闭环系统的根轨迹,本质上就是分析特征方程的根随参数K增大的运动轨迹。对于这个二阶系统,直接利用一元二次方程的求根公式就可以得到极点的解析表达式。根据判别式的正负,可以清楚地看到极点先在实轴上相向运动,在某一点相遇后分离并平行于虚轴向上下两端移动。第三问是基于根轨迹对系统动态性能的分析。由于极点的实部始终小于零,说明闭环系统在给定的参数范围内永远是稳定的。而极点是实数还是复数则决定了系统的时域响应特性,当K较小时极点都在实轴上,系统处于过阻尼或临界阻尼,响应不会出现超调和震荡;当K增大越过分离点后,极点变成共轭复数,系统进入欠阻尼状态,响应速度虽然加快但会出现震荡。